实验室简介
感知定位与智能导航实验室创建于2021年,立足于服务国家“智能制造”与“人工智能+”等重大发展战略,紧密围绕高端制造、智能机器人、智慧物流等战略性新兴产业的迫切需求,聚焦移动机器人高精度定位与导航、视觉SLAM、多传感器融合感知、三维环境重建与语义理解等前沿研究方向。实验室致力于突破智能移动系统在动态复杂环境中的感知、决策与导航等关键技术,推动相关成果的产业化应用,助力行业智能化升级。
项目及成果
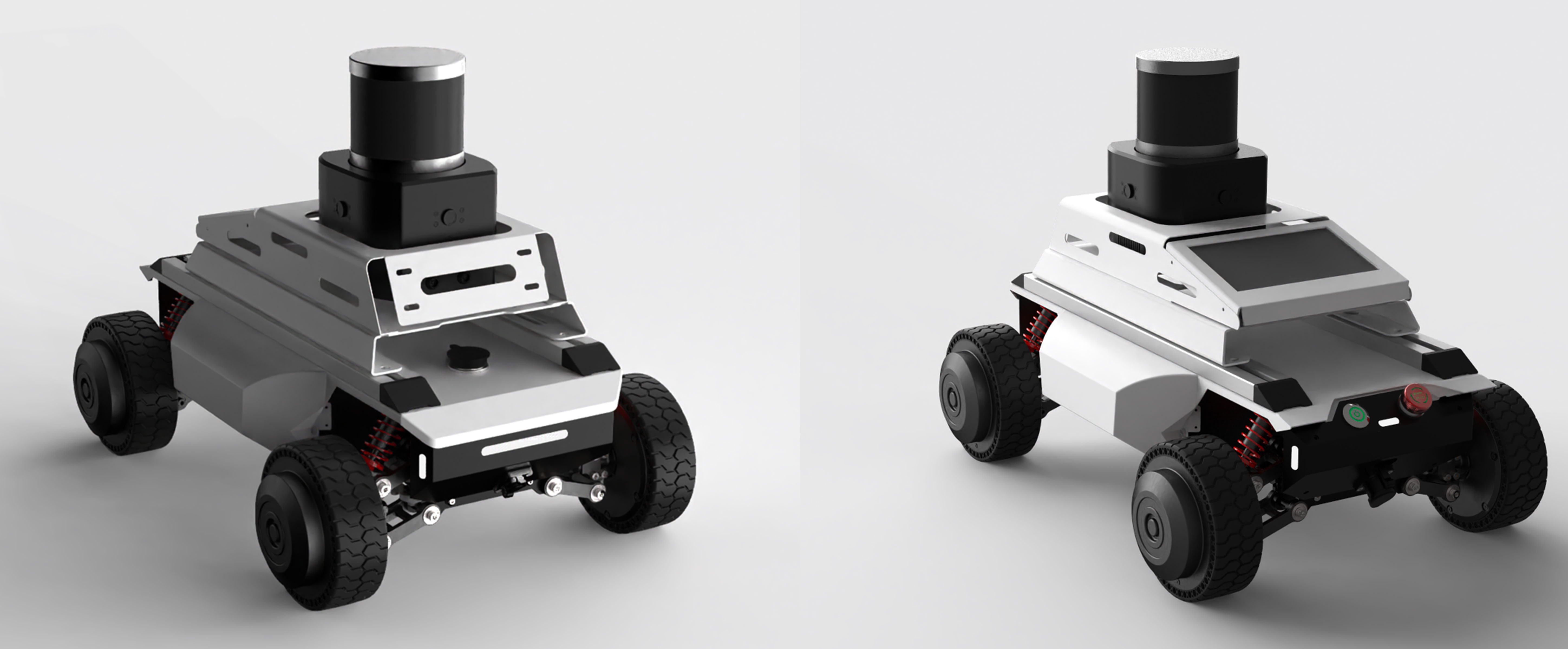
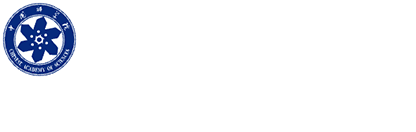
近年来共承担各类科研项目10余项,包括中国科学院STS项目1项、福建省蓝军机器人系统军民融合协同创新中心项目1项;并与徐工集团、龙合智能装备制造有限公司、福建亿来实业有限公司等企业签署技术委托开发合同。同时,与中国机械总院青岛分院、铽罗(上海)机器人科技有限公司等单位建立了深度合作关系。累计发表学术论文10余篇,授权专利10余件。研发成果包括基于四目全景相机的视觉惯性SLAM算法、高精度托盘定位识别系统、挖掘机满斗率测量系统等一系列创新应用,有效推动了合作企业的自动化与智能化转型进程。
团队负责人
孙波,高级工程师、硕导,毕业于德国汉堡大学,现任中国科学院海西研究院泉州装备制造研究中心课题组长、中国自动化学会竞赛工作委员会委员、中国移动机器人产业联盟专家委员会专家,长期从事全源定位导航,移动机器人,视觉/激光SLAM 及全景相机深度估计的研究工作。
团队构成
高级工程师1人、助理工程师3人,科研助理1人,硕博士研究生10余人
研究方向
移动机器人导航定位、计算机视觉
应用领域
智能装备、工业机器人、自动装卸系统、移动机器人
招生专业
控制科学与工程、控制工程、新一代电子信息技术、电子信息
联系方式
联系人:程凯
电 话:15294853819